如图所示,杠杆在竖直向下拉力F的作用下将一物体缓慢匀速提升.下
题目
| 如图所示,杠杆在竖直向下拉力F的作用下将一物体缓慢匀速提升.下表是提升物体时采集到的信息: |
 |
| (1)若不计杠杆自重和摩擦,求拉力F的大小; (2)若实际拉力F为90N,求拉力做的总功及杠杆的机械效率. |
 |
所属题型:计算题 试题难度系数:中档
答案
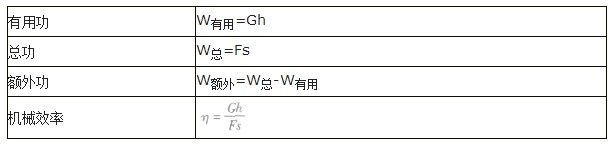
| 解:(1)如图,当杠杆从水平位置匀速转到图示位置时,OC、OD为阻力臂和动力臂 ∵△OCA′∽△ODB′, ∴  = = ,大小不变; ,大小不变;又∵FL1=GL2,阻力(物重G不变), ∴当杠杆匀速转动时,动力F的大小不变; ∵FLOB=GLOA, ∴F=  = = =80N; =80N;(2)由表中数据可知,s=0.1m,h=0.2m, W总=F′s=90×0.1m=9J,W有用=Gh=40N×0.2m=8J, 杠杆的机械效率:η=  ×100%= ×100%= ×100%≈88.9%. ×100%≈88.9%. |
考点梳理
初中二年级物理试题“如图所示,杠杆在竖直向下拉力F的作用下将一物体缓慢匀速提升.下”旨在考查同学们对 杠杆的平衡条件、 功的计算、 杠杆的机械效率、 ……等知识点的掌握情况,关于物理的核心考点解析如下:
此练习题为精华试题,现在没时间做?添加到收藏夹,以后再看。
根据试题考点,只列出了部分最相关的知识点,更多知识点请访问初二物理。
- 杠杆的平衡条件
- 功的计算
- 杠杆的机械效率
考点名称:杠杆的平衡条件
杠杆的平衡条件:
杠杆的平衡条件是:动力X动力臂=阻力X阻力臂
或
这个平衡条件也就是阿基米德发现的杠杆原理。
上面的关系式也可以写成下面的形式:
杠杆的定义:
只要在力的作用下能够绕支撑点转动的坚实物体都是杠杆。跷跷板、剪刀、扳子、撬棒等,都是杠杆。
杠杆的五要素:
(1)杠杆转动时绕着的固定点叫支点;
(2)使杠杆转动的力叫动力;
(3)阻碍杠杆转动的力叫阻力;
(4)从支点到动力作用线的距离叫动力臂;
(5)从支点到阻力作用线的距离叫阻力臂.
杠杆的原理:
主条目:力矩当杠杆处于静止状态或匀速转动状态时,杠杆就处于平衡状态。
杠杆的平衡条件:动力×动力臂=阻力×阻力臂
用字母表示就是:F1×L1=F2×L2
杠杆的平衡条件又叫杠杆原理,是阿基米德最早提出的。据此他发出了给我一个支点,我可以撬动地球。的豪言壮语、
杠杆的分类:
一类:支点在动力点和阻力点的中间。称为第一类杠杆。既可能省力的,也可能费力的,主要由支点的位置决定,或者说由臂的长度决定。例:跷跷板,剪刀,船桨,(运煤气罐等重物的)手推车,鞋拔子,塔吊,撬钉扳手等。
二类:阻力点在动力点和支点中间。称为第二类杠杆。由于动力臂总是大于阻力臂,所以它是省力杠杆。例:坚果夹子,门,钉书机,跳水板,扳手,开(啤酒)瓶器,(运水泥、砖的)手推车。
三类:动力点在支点和阻力点之间。称为第三类杠杆。特点是动力臂比阻力臂短,所以这类杠杆是费力杠杆,然而能够节省距离。例:镊子,手臂,鱼竿,皮划艇的桨,下颚,锹、扫帚、球棍等以一手为支点,一手为动力的器械。
另外,像轮轴这类的工具也属于一种变形杠杆。就拿最简单、相似于第一类杠杆的定滑轮来介绍,滑轮轴心好比支点,两端物体的拉力好比杠杆的两端施力,而如果滑轮是一个完美的圆,施力臂和阻力臂皆将是圆的半径。
利用杠杆平衡条件来分析和计算有关问题,一般遵循以下步骤:
(1)确定杠杆支点的位置。
(2)分清杠杆受到的动力和阻力,明确其大小和方向,并尽可能地作出力的示意图。
(3)确定每个力的力臂。
(4)根据杠杆平衡条件列出关系式并分析求解。
考点名称:功的计算
功的定义:“功”一词最初是法国数学家贾斯帕-古斯塔夫·科里奥利创造的。物理学中,必须有作用在物体上的力,且物体在这个力的方向上通过一段距离,就说这个力对物体做了机械功,简称做功,是指力对距离的累积。国际单位制单位为焦耳(J)。
以下三种情况下力对物体不做功:
(1)靠惯性运动的物体没有力对它做功。例如:某同学踢足球,球离开脚后飞出10m远,足球飞出10m 远的过程中,人做功为零。
(2)物体受到力的作用,但没有移动距离,也就不可能在力的方向上通过距离,力对物体不做功。如:一辆汽车停止在路边,一个人用很大的力却没有推动它。推力对汽车不做功。
(3)物体受到力的作用,同时也运动了一段距离,但两者相互垂直,即在力的方向上没有通过距离,这个力也没有对物体做功。如手提水桶在水平面上运动一段距离,水桶虽然受到手的提力作用,但是由于手提桶的力的方向始终竖直向上,跟水平地面垂直,所以在水平面上走得再远,手的提力对水桶也没有做功。
- 最新内容
- 相关内容
- 网友推荐
- 图文推荐


| [高考] 2022 西安电子科技大学《软件工程》大作业答案 (2022-04-25) |
| [家长教育] 孩子为什么会和父母感情疏离? (2019-07-14) |
| [教师分享] 给远方姐姐的一封信 (2018-11-07) |
| [教师分享] 伸缩门 (2018-11-07) |
| [教师分享] 回家乡 (2018-11-07) |
| [教师分享] 是风味也是人间 (2018-11-07) |
| [教师分享] 一句格言的启示 (2018-11-07) |
| [教师分享] 无规矩不成方圆 (2018-11-07) |
| [教师分享] 第十届全国教育名家论坛有感(二) (2018-11-07) |
| [教师分享] 贪玩的小狗 (2018-11-07) |
